Robotics
Wardrobe dressed up 3 robots for the participant to choose from and interact with. Now, they are Fernbot, Blackboxbot and Poisebot. We picked those "garments" for the following reasons. 1. The plant: fern moves gracefully when stirred. 2. The weight: black box makes pungent statement when moved. 3. The fragility: red sponge balls highlight keeping poised softly.
Declaration
|
 |
 |
 |
|
Fernbot
|
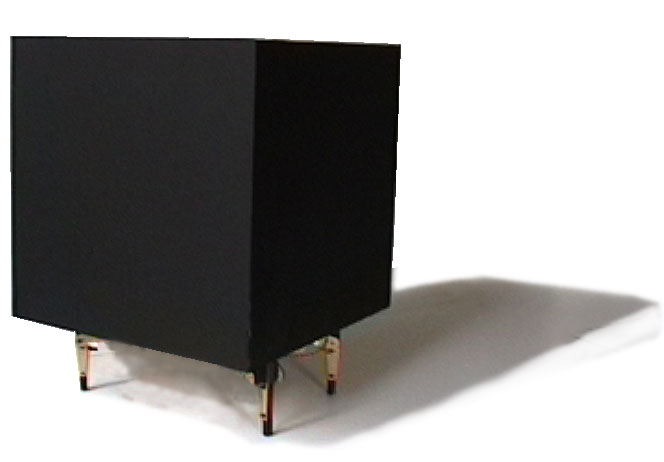
Blackboxbot
|
Poisebot
|
Posture, path & pace
All three robots have distinct movement characteristics: 6-legged walk, 4-legged walk and keeping balance on 2 wheels. The 3 movement mechanics demand separate programming to run their distinct postures, paths and paces.
As the session starts, i.e. the robot comes "alive" with the feed of participants EEG, the predefined initial set of robotic movement becomes modified in real time by any or all of the following: adjusting direction, altering pace and adapting height and gate mode in the case of legged ones while adapting swivel frequency in case of the wheeled one.
For safety measure: as the ongoing EEG measurements reach certain extreme criteria such as "high emergency" predefined posture and gait set gets activated with each robot.
At the end of the session of 15 min the robot movement turns into resting posture and switches to total inactivity.
Lecture
|
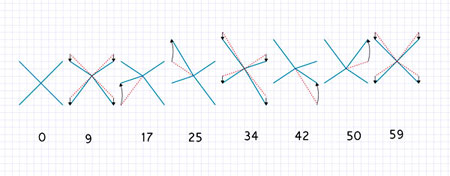 Robotsteps for Blackboxbot
Robotsteps for Blackboxbot
|
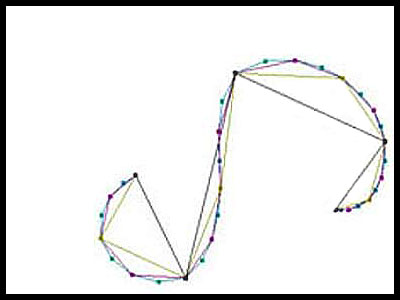 Robotpath
Robotpath
|
VVVV software
With VVVV we built and integrated several interfaces to translate the dynamics of electrical activity in the participants brain into the dynamics of robotic movement which is the essence of Double Bubble's brain-machine-environment.
VVVV is an open source software toolkit that suited our need to process and synthesize in real time. With VVVV we were able to process the incoming dataflows from the EEG measuring software (Bioexplorer), the patch for IR camera for location control (own development) and the robot's brainboard for movement control (also own development) to match predefined set of eeg characteristics to the different movement variables of the robot for instant interaction with the participant.
Lecture
|
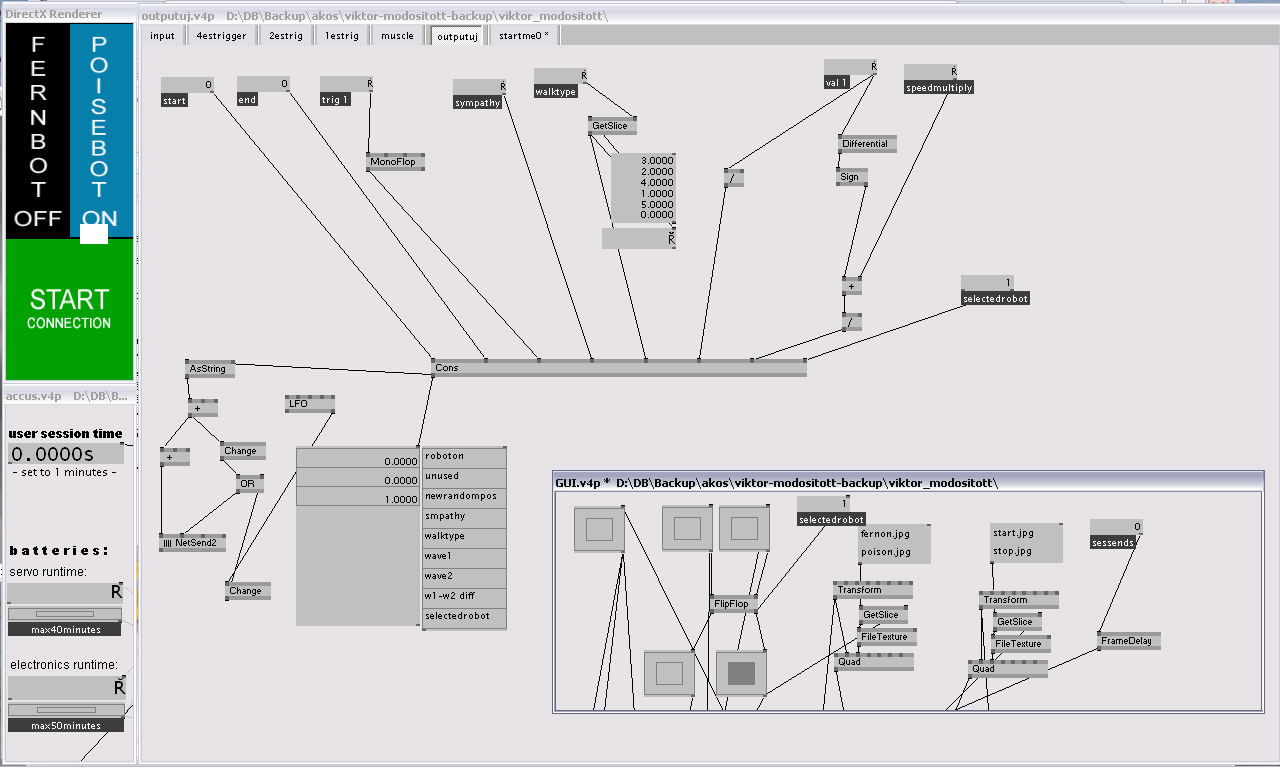 VVVV control screen-shot 1
VVVV control screen-shot 1
(Click to enlarge)
|
IR Playground surveillance
The surveillance part of the robotics software watches the playground with an IR camera and corrects the robot's path.
1. To avoid collision with the playground's borders when coming close to the boundary the robot's path is corrected gradually to parallel the borderline or to bounce back straight if the predicted angle of collision were close to 90 degrees.
2. The software corrects divergence from the expected path caused by either the mechanical and motoric limitation of the robot or by the influences of the playground surface.
The software allows for the redefinition of borders for different playgrounds.
Lecture
|
 Infrared view of 3 leds on Fernbot
Infrared view of 3 leds on Fernbot
|
 Setting up boundaries
Setting up boundaries
|
Communication
Technically speaking most communication within the Bubble goes on wireless Bluetooth channels. The exceptions are the coax cable connecting the IR camera to the desktop computer, the IR signals from the robot to camera and the electrical signals picked up by the EEG sensors.
Lecture
|
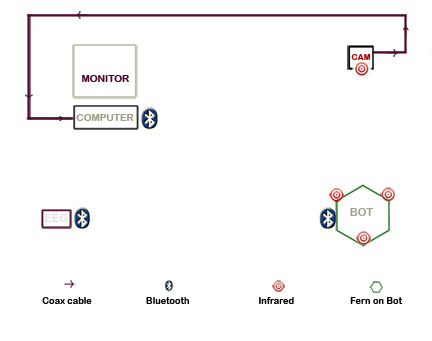 Schematic drawing of communication
Schematic drawing of communication
|
Interface (EEG)
By placing 5 sensors on the participant's forehead we monitor the small currents (micro electric flows) of the brain and the interface interprets those with classical Fourier amalyses as standard electroencephalograms (EEG) signals.
The focus is on the slower EEG ranges mainly, on 4 frequency domains between 0.1 - 40 Hz wavelengths that allow a close to real time correspondance between the robot's mechanical dynamics and the EEG characteristics. (Note: Selection is needed because the storms in your brain are too numerous and fastly moving!
During the interaction the power of parts of EEG alpha waveband, for instance, dictate specific robot movements, in our case, speed and/or angle of turning, depending on how and if these values manifest and differentiate themselves in the left and the right hemispheres.
The Bubble also operates with emergency algorithms in "high emergency" (when you panic) they suspend contact and put the robot into hibernation mode and in "low emergency" (when you fall asleep) the algorithms put the robot into hyperactive mode until less extreme EEG values return and interaction can resume.
Lecture
|
 Sensor placement Sensor placement
|
Bubble - the tent
An approximately 6,5 meters long, 5 meters wide and 3,5 meters high transparent plastic tent provides a protected environment for experimentation. A ventillator constantly blowing air into the tent creates roughly 1,15 bar athmospheric pressure which provides the only structural support. A combination of a water filled valve and bags containing about 1 metric ton of sand placed around the base perimeters of the tent keep the air pressure at the required level and the tent from rising off the ground.
Lecture
|
 Bird′s eye view of Bubble space
Bird′s eye view of Bubble space
|
R & D
For a more stable recognition of Poisebot swivelheads are being considered.
Plans
|
 Swivel head sketches for better infrared visibility Swivel head sketches for better infrared visibility
|
 Maintenance video. Click image!
Maintenance video. Click image!
|
{kind=link}